
对于接触机器人、特别是机器人焊接的人来说,下面的作业题一定不会陌生的:
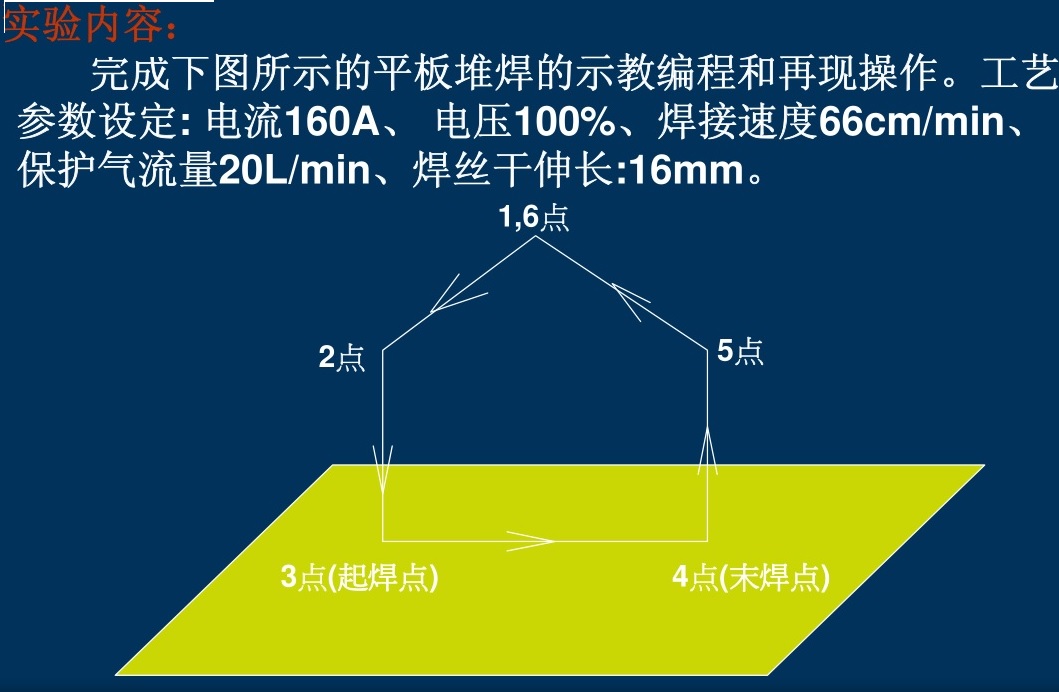
这应该是示教操作最基本的练习题,通过此题,可以初步掌握机器人焊接的基本操作及相应的编程含义,本节通过可视化的虚拟仿真技术(不用G代码),搭建最小的焊接机器人系统,来完成此题,通过每一步操作,可以掌握机器人仿真过程的基本流程与思路。
准备平台:
solidworks(可选);roboDK(本例必用)
具体步骤如下:
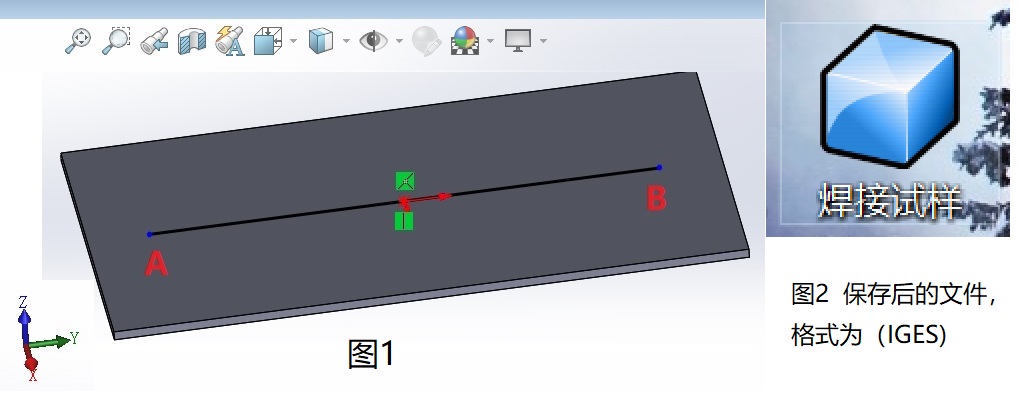
1、用solidworkd 软件绘出薄板的三维立体图(100x200x3),并保存为IGES或STEP格式文档(图1和2);
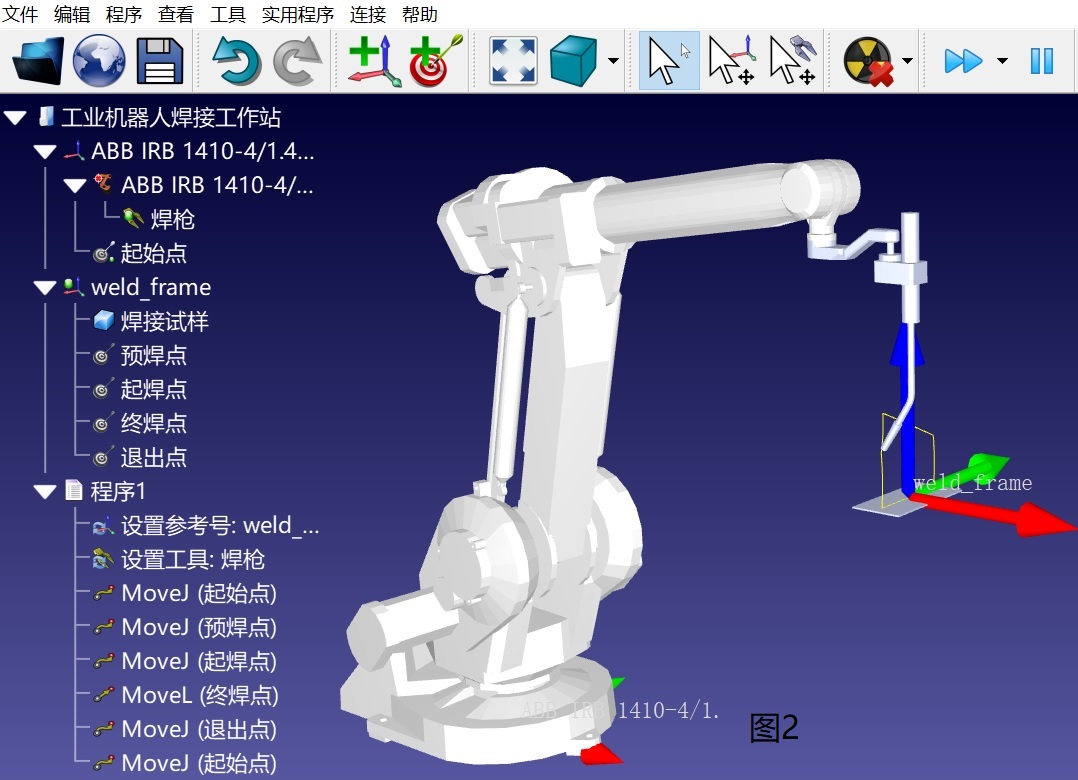
2、打开roboDK软件,调入机器人、焊枪、及焊接试样;添新坐标系,命名为:weld_frame,把焊接试样拉在weld_frame坐标系下(图2);
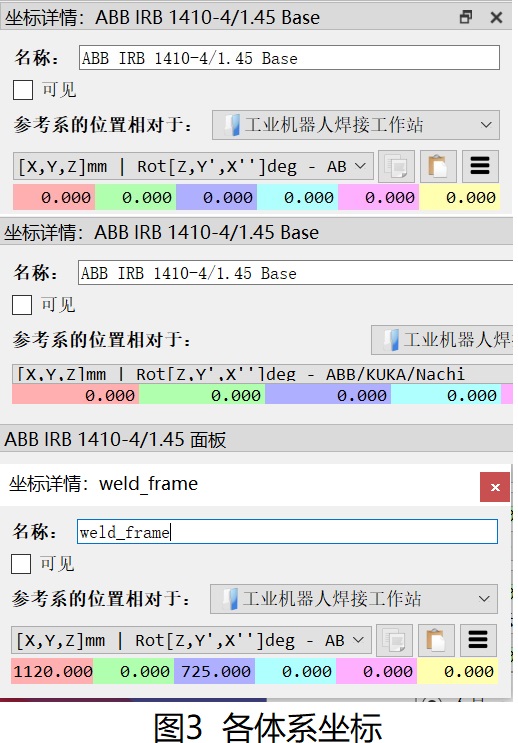
3、设计各体系的坐标(此步很关键),见图3:
(由于网页容量限制,请大家转到:一步步帮你可视化构建最小的机器人焊接系统(2))