
阅读关键词: 变位机 机器人焊接 激活机械装置单元 ActUnit(激活一个机械单元)
一、机器人与变位机设计描述
随着机器人时代的到来,越来越多的机器人在我们的生活、生产中得到广泛应用,成为了时代的特征。尤其在工业生产领域,工业机器人已经广泛的应用在各条生产线上,大有取代劳动者的趋势。因此也越来越多的人期望学习掌握机器人技术。
通过机器人仿真是学习机机器人技术的一个快捷和必备的方法,机器人仿真技术既可以能够实现对整条生产线的设计与优化,同时也对具体的生产加工工艺进行工艺设定,可以说熟练的掌握机器人仿真技术,是学会机器人技术的前提。
在工业机器人实际生产中,往往是机器人和变位机同时进行协调配合,才能使加工工艺更流畅,加工质量得到保证。所以熟练掌握机器人和变位机的设定是机器人仿真的一个主要内容。变位机的设定,虽有很多资料可以查找到,但这些资料中往往都是以变位机和一个较为复杂的加工路径在一起,这样对一个初学者而言,加工路径本身都没有很熟练掌握,所以很难理解和掌握变位机的问题了。基于这种情况,我们通过一个极简单的加工例子来突出说明变位机的设定的这个重点问题。
我们选择的简单加工工艺的模型选用ABB机器人的两个管对接焊接模型,在生产中是很常见的,也是基本的管道焊接加工工艺。这个焊接生产过程就是当焊接机器人的焊枪到达接位置时,姿势保持不变而让变位机转动(从而带动焊管的转动),这样当变位机转一圈时,就完成了管道焊接的一条环焊缝的机器人焊接过程。这对变位机的基本要求就是两个,一个是启动定位机,让它转动;另一个就是在程序运行过程中调动变位机的转动。
二、具体的焊接机器人仿真设计过程
1)机器人工作站构建
打开软件ABB RobotStudio 6.08,选择机器人焊枪和变味机。变位机如图1所示的型号。

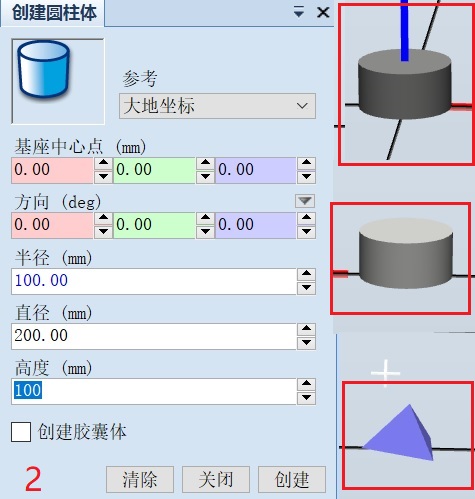
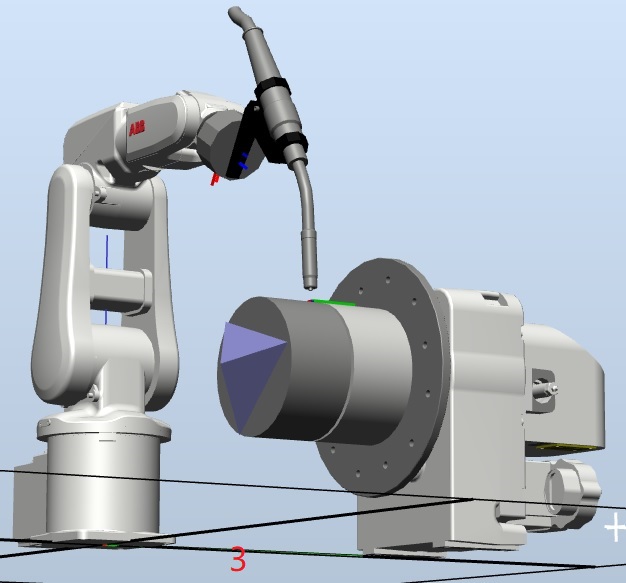
在建模菜单,按图2尺寸建两个圆柱体和一个三棱锥(其实三棱锥不是必须的,只是便于看到圆柱体随变位机一起转动)。按图3所示排列安放(用到的指令为移动指令和安装到指令,其中移动指令在主界面,而安装到指令是单击部件,如机器人、圆柱体等,然后右键就可以看到安装到指令)。
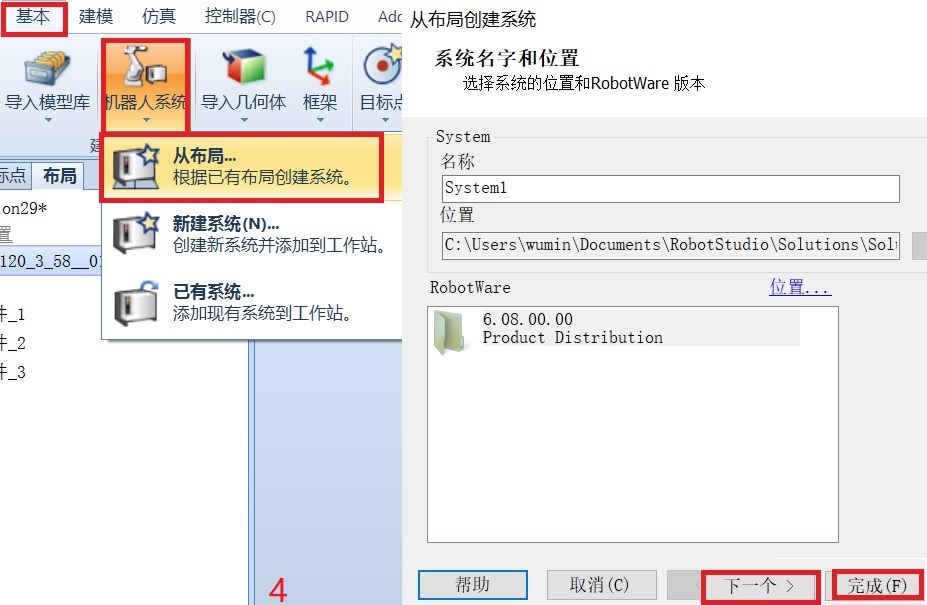
启动工作站系统,从布局建立系统(见图4)
2)路径建立
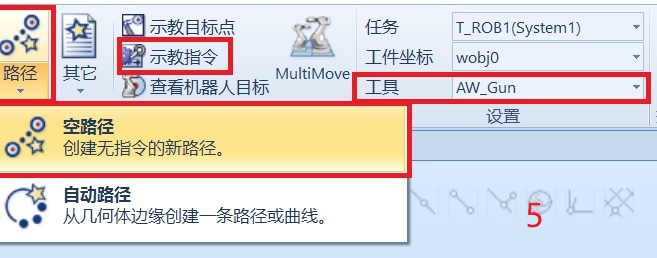
建一个空路径。依次指令是基本--路径--空路径(见图5)。
3)设定加工路径。
这时选择是工具坐标(见图5)。
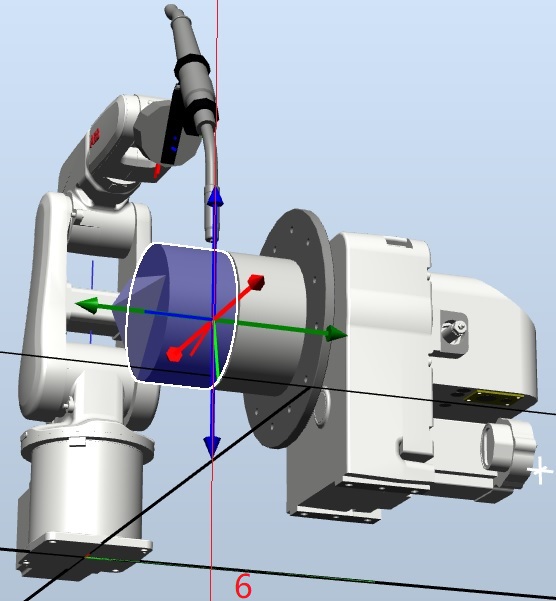
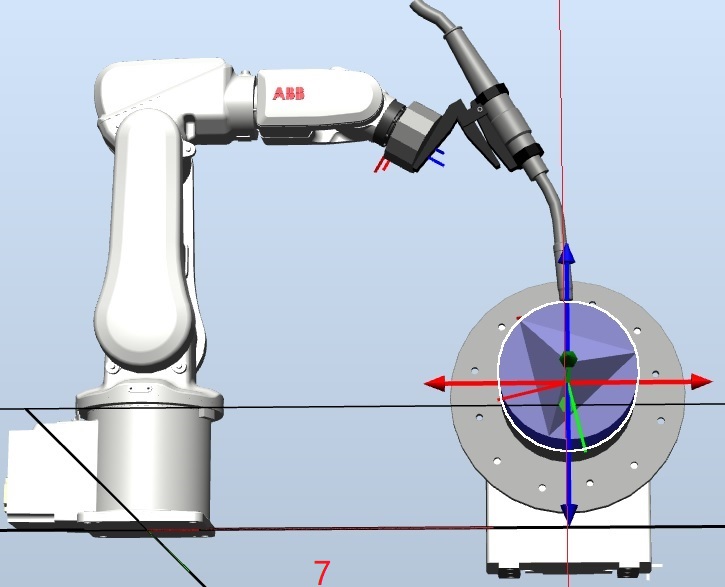
通过线性移动把焊枪移动到环焊缝位置的正上方,即焊枪移到图6和图7所示位置,作为初始位置(作为路径点1),设定示教指令(见图5)。
将焊枪往下移,到环焊缝的焊接位置,设定示教指令(作为路径点2)。
激活变位机机械装置单元。这一步最关键,是保证变位机随着指令而进行启动转动。具体设置方法如图8所示。注意两个勾选。
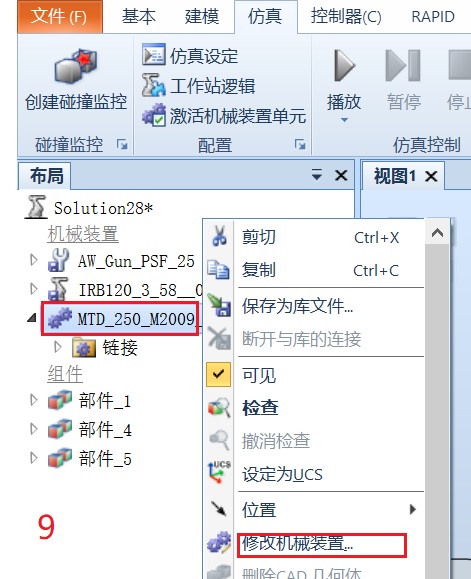
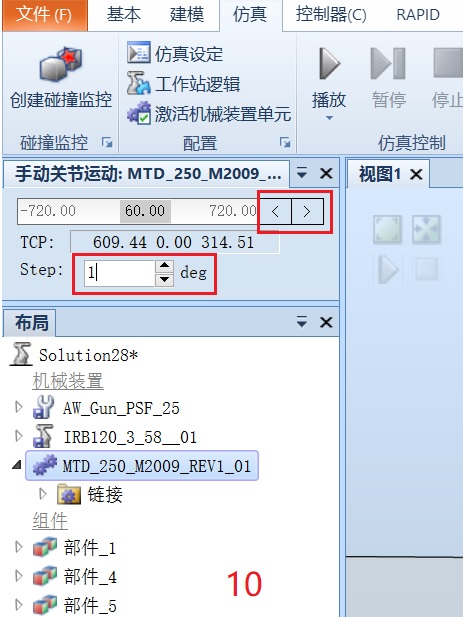
启动变位机,让它起始转动,方法如图9和图10所示。可以看到变位机开始转动,让它转动360度,表明已经完成环焊缝的焊接。
在此位置设定示教指令(作为路径点3)。

回到初始位置,设定示教指令(作为路径点4,与路径点1重回,作为练习内容,也可以不与路径点1重回)。
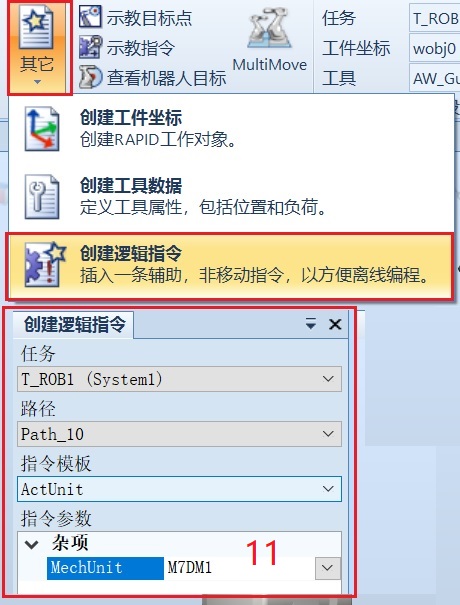
4)添加逻辑指令,保证变位机的设置在程序运行中起作用。这一步也是最关键的,就是保证所设计所有指令在程序运行中正常的发挥作用,也就是上面所设定的变位机转动指定生效。
方法如图11所示,选择ArcUnit指令。
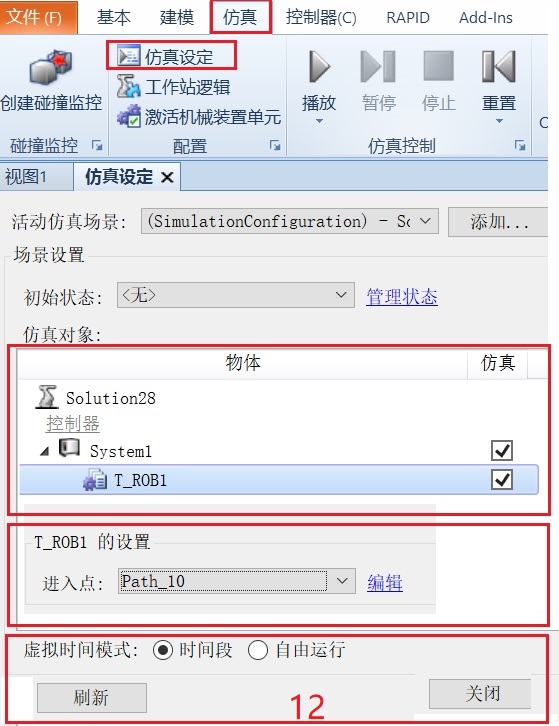
5)仿真
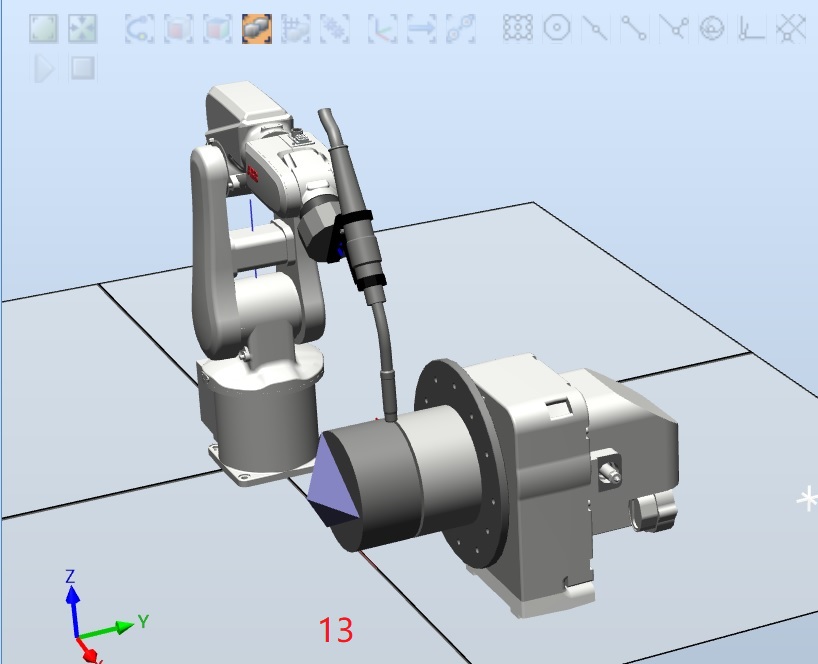
仿真设定如图12所示,仿真运行结果如图13所示。
总结与扩展
通过仿真演示可以看到,随着变位机转动一圈,环焊缝就完成了焊接,达到了预期设计目标。
下面我们总结一下,可以看到变位机的设定,主要就是两个关键指令,第一个是激活机械装置单元;第二个是ActUnit。下面具体说明如下:
激活机械装置单元
变位机是作为机器人的外部轴而存在,通过机器人控制器来控制。
默认情况下变位机机械装置单元名称为STN1,通过激活变位机机械装置单元,可以实现操作时同时记录下变位机的关节运动数据。
具体操作为:RobotStudio软件“仿真”菜单栏下,在“配置”功能卡中点击“激活机械装置单元”命令按钮,在弹出的当前机械单元对话框中将变位机机械装置单元“STN1”勾选即可。
ActUnit
ABB机器人指令手册中文版关于ActUnit详细说明如下。
1.2.ActUnit—激活一个机械单元
用途:
ActUnit用来激活一个机械单元。例如当使用普通驱动单元的时候,它可以用来决定哪一个单元被激活。该指令只能在主任务T_ROB1中使用,或者如果处于多运动系统,在Motion任务中。
ActUnit的基本范例说明如下:
例1.ActUnit orbit_a; orbit_a机械单元的激活。
AccUnit MechUnit MechUnit:机械单元数据类型:mecunit(机械单元)要激活的机械单元的名称。
程序执行:当机器人的和外部轴的实际路径准备好以后,整个路径被清理并且特定的机械单元被激活。这意味着它被机器人控制和监视。如果多个机械单元共享一个普通驱动单元,这些单元中的一个的激活,也将把该单元连接到普通驱动单元。
限制:如果在该指令之前有一个运动指令,那个指令的程序中必须带有停止点(区域数据fine),而不是一个通点,否则将不能进行电源失败后的重启。
AccUnit指令不能在连接到以下任何特定的系统事件的RAPID程序中执行:电源上电,停止,Q停止;重启或者复。
语法:
ActUnit [MechUnit":="] <机械单元变量(VAR)>";"
敬告:本内容为制作人独立制作,非经制作人书面授权,请不要转载发布!
如果您认为本文档内容对您有益的话,恳请您把本网站-焊接科技网加入收藏夹,或记录本网站网址:weldbest.net,其实是很好记的,是由weld(焊接) 和best (最好)两个英文单词连接而成(其意义为做焊接最好的朋友),谢谢!